POPEYE
"Popeye" is a robotic arm that can fetch and place items from and to a rack. The robotic arm can be applied in any "Fetch and Place" scenario like a pharmacy setting where the arm can help in order fulfillment by fetching and restacking the medicine keyed into the ordering system.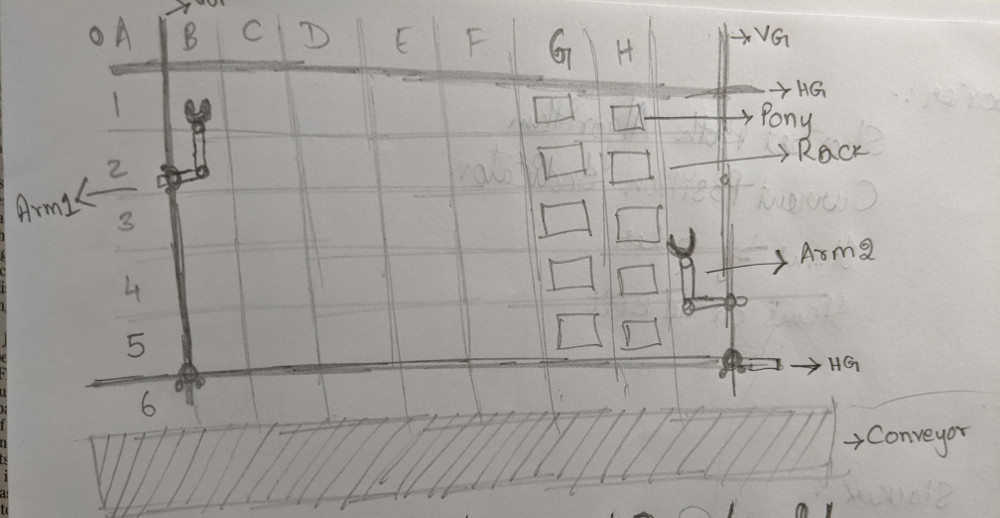
The Name:
The first thing that i remember when i think about a powerful arm is "Popeye". Need to check if there is a possiblity to use the name for the product. The other names i think at this point are HULK, POFA.
Terminology:
ARM
A mechanical / robotic arm with possibly a 6 or 8 "Degrees of Rotation". The weight lifting capablity of the arm will need to be studied and tuned to market needs.RACK
A shelf / rack made of any material like steel or wood or plastic or any other like material. The rack will have the capablity to store medicine in rectangular cubicle boxes. The rack will look like a vertical chess board in my visualizaiton.STACK
A collection of "Racks" placed next to each other with ample distance between them to have a Conveyor that could transport the Pony to and from the "Rack".PONY
A rectangular storage cube. To start with this will just be a container and will be used to store medicine which could be packaged in bottles or strips or packs or plastic containers. More than one type / brand medicine can be stored in one Pony. The make of the Pony will need to be sturdy to withstand rough handling of a "Arm" and transport on a conveyor belt.The "Pony" at a later point of the execution of the project can be made smarter to have a digital display to show what order numbers can be serviced from it. In that case it will become more inteligent and can be renamed as "Horse" :)
CONVEYOR
A conveyor belt setup that runs along the bottom or the rack and carries the payload to the medicine packing and delivery counter.HORIZONTAL GUIDE
A horizontal metal pole with ridges for grip. This pole will act as the guide / track on which the wheels of a motor will move. The wheels will move carrying the "Vertical Guide" pole.VERTICAL GUIDE
A Vertical metal pole with ridges for grip. This pole will act as the guide / track on which the wheels of a motor will move.The "Arm" will be mounted on this "Vertical Guide" on a motor base that can move along the X - axis.
The Working:
Step 1:
Place one or more medicine bottle / strip / pack in a marked "Pony". The details of medicine to Pony link is recorded. M denoting the medicine and P for Pony.| Medicine | Pony |
|---|---|
| M1 | P1 |
| M2 | P2 |
| M3 | P2 |
| M4 | P3 |
Step 2:
A set of Ponies is placed in a "Rack" that has marked slots and the map of Pony position on the Rack is recorded.| Rack | RPosition | Pony |
|---|---|---|
| R1 | X1-Y1 | P1 |
| R1 | X2-Y1 | P2 |
| R1 | X3-Y1 | P3 |
| R1 | X1-Y2 | P4 |
| R1 | X2-Y2 | P5 |
| R1 | X3-Y2 | P6 |
| R1 | X1-Y3 | P7 |
| R1 | X2-Y3 | P8 |
| R1 | X3-Y3 | P9 |
Step 3:
The "Horizontal Guide" (HG) and "Vertical Guide" (VG) is fixed between two Racks. The "Arm" is mounted on the VG. Imagine a "Rack" to be a "Graph" with markings on the X and Y axis. The "Vertical Guide" and "Horizontal Guide" makes it possible for the "Arm" to access any point on the "Rack".Step 4:
The Conveyor is fixed between the two Racks and leads upto the packing counter, and from the counter to the Rack. Any Pony fetched by the Arm will be placed on the Conveyor and will be transported upto the packing counter. Once the Pony is picked from the Up Conveyor, it is manually placed on the Down Conveyor that transports the Pony back to the Rack from the packing counter.Step 5:
The customer arrives at the Pharmacy Counter. The Pharmacist keys in the order from the prescription provided by the customer.Step 6:
The "Fetcher Module" takes the first item from the order and derives the Rack and the position.Example: If the item on the order is M1, then the "Fetcher Module" will derive the address of M1 as P1 -> R1, X1-Y1 from the table.
Step 7:
The Arm is given the "Fetch" command along with the address of the Pony. The Arm moves along the HG and VG, Fetches the Pony and places it on the Up Conveyor.Step 8:
The Conveyor transports the Pony to the packing counter. The Pharmacist picks up the required medicine and places the Pony on the Down Conveyor.Step 9:
The Pony gets transported to the Rack and the "Stack Module" issues the "Stack" command to the Arm along with the address of the Pony. The Arm Fetches the Pony from the belt and stacks it at the given address.Step 10:
More than one Rack is installed to place more Ponies to form a "Stack" and the Arm to the Rack relationship is recorded and added to the address when the "Fetch" and "Stack" is executed.
Modules
SORTER
The optimization guideline is "Fetch / Stack more in fewer travel". More than one item will be on the order,and when an order is placed the "Sorter" module will have to sort the items in the Fetch list in such a way that the Arm will make the least possible travel. There can be more than one order parallely and the worst case scenario might be that one order does not get fulfilled when one of the items on the order is a far Fetch and there were other orders which had items close to the Arm. To mitigate this scenario we need to define a Fetch threshhold time for an item, and when the Wait croses the threshhold the priority of the item in wait should be set to high to allow execution of the next Fetch rather than being pushed to low based on the distance algorithm. The Stack execution should also be sorted on the same principles.CLUBBER
The optimization guideline is "Fetch / Stack more in fewer travel". More than one item will be on the order,and when an order is placed the Fetch will be executed one item after the other based on priority set by the sorter. The Pony is usually large enough to carry more than one medicine. In that case the travel optimization of the Arm can be achieved by placing together two or more medicines that are identified to be ordered together. The Clubber module will identify the "co-passenger" medicines that can be placed in the Pony by running through the Clubber algorithm on the orders placed in the previous month. A month is chosen to be a good time period to base the results as the seasonal disease can cause one type of medicine ordered more than the other and in combination of one another.
Reading
Aurdino
Click for reading about Robotic ArmClick for reading about vertical motor movement.